Т»ЎўПоДҝГыіЖЈә
ВДҙшКҪЕ©»ъЧ°ұёЦЗДЬ¶ҜБҰЖҪМЁ№ШјьјјКхУлУҰУГ
¶юЎўМбГыТвјыЈә
ЦЗДЬЕ©»ъЧ°ұёөДСР·ўУлУҰУГКЗЎ°ЦР№ъЦЖФм2025ЎұЎўЎ°Т»ҙшТ»В·ЎұХҪВФөДәЛРДДЪ
ИЭЦ®Т»Ј¬Ў°К®ИэОеЎұЖЪјдЈ¬ҝЖјјІҝҪ«Ў°ЦЗДЬЕ©»ъЧ°ұёЎұБРИлУЕПИЖф¶ҜөДЦШөгҝЖСРЧЁПоЈ¬
ҙуБҰЦ§іЦЕ©»ъЧ°ұёј°ЖдЦЗДЬ»ҜјјКхСР·ўЎЈ
ОТРЈРӨГыМОАПКҰНЕ¶УХл¶ФВДҙшКҪЕ©»ъЧ°ұё¶ҜБҰЖҪМЁөДұдЛЩҙ«¶ҜЧ°ЦГјҜіЙАл
әПЎўұдЛЩЎўІоЛЩЧӘПтУлЦЖ¶ҜөИ¶аЦЦ№ҰДЬөДМШөгЈ¬ПЦУРВДҙшКҪЕ©»ъЧ°ұё¶ҜБҰЖҪМЁҙ«
¶ҜР§ВКөНЎўЧӘПтҫ«ЧјРФІоЈ¬ЧӘПт№эіМЦРВДҙшІаұЯТЧ¶С»эДаНБөјЦВЛ®МпІ»ЖҪХыөИОК
МвЈ¬ҝӘХ№БЛВДҙшКҪЕ©»ъЧ°ұё¶ҜБҰЖҪМЁПИҪшұдЛЩҙ«¶ҜПөНіСРҫҝЈ¬·ўГчБЛЎ¶Т»ЦЦУГУЪ
ВДҙшЧ°ұёөДұИАэЧӘПтКҪұдЛЩЖчЎ·өИәЛРДЧЁАыјјКхЈ¬КөПЦБЛВДҙшКҪЕ©»ъЧ°ұёёЯР§Зэ
¶ҜәНҫ«ЧјЧӘПтЈ¬МбёЯБЛВДҙшЕ©»ъЧ°ұёНЁ№эРФУлРРК»°ІИ«РФЎЈІў»щУЪВДҙшКҪЕ©»ъЧ°
ұёЧчТөКұ№Өҝцұд»ҜЙЩЈ¬І»РиТӘЖө·ұІЩҝШАләПУл»»өөЧ°ЦГЈ¬ЦЗДЬ»ҜМбЙэЗұБҰҙуөДМШ
өгЈ¬ФЪВДҙшЕ©»ъЧ°ұёұИАэЧӘПтКҪұдЛЩЖч»ъРөҪб№№ЦРөДАләПЖчЎўұдЛЩ»»өөЎўІоЛЩұИ
АэЧӘПтЎўЦЖ¶ҜөИЧ°ЦГөЧІгЙијЖКұЈ¬ҝјВЗНвҪУөзҝШЧ°ЦГөДұгҪЭРФУлҝЙДЬРФЈ¬ҝӘХ№БЛ
»щУЪВДҙшКҪ¶ҜБҰЖҪМЁөДТЧУЪөзҝШ»ҜУлЦЗДЬ»ҜөЧІгјјКхҝӘ·ўЈ¬·ўГчБЛЎ¶Т»ЦЦККәПФ¶
іМҝШЦЖ»»өөөДВДҙшЧ°ұёУГұдЛЩЖчЎ·ЎўЎ¶Т»ЦЦ¶аНЁөАВДҙшЧ°ұёТЈҝШЙиұёЎ·өИ¶аёцәЛ
РДЧЁАыјјКхЈ¬ҪвҫцБЛВДҙш¶ҜБҰЖҪМЁ»ъРөҪб№№УлЦЗДЬ»ҜҪУҝЪИЪәПөДјјКхДСМвЈ¬КөПЦ
Ф¶ҫаАлТЈҝШјЭК»ј°ОЮИЛјЭК»ЎЈҝЛ·юБЛПЦУРВДҙшЕ©»ъЧ°ұёНЁ№эЦұҪУ¶С»эөзҝШЧ°ЦГКө
ПЦЧФ¶Ҝ»ҜөјЦВөДҝШЦЖҫ«¶ИөНЎўҪб№№ёҙФУЎўіЙұҫёЯөИОКМвЈ¬¶ФМбёЯЕ©»ъЧ°ұёөДЦЗДЬ
»ҜЛ®ЖҪҫЯУРЦШТӘөДТвТеЎЈ
ЖдЧЫәПСРҫҝіЙ№ыХэФЪәюДПЕ©·т»ъөзЙиұёУРПЮ№«ЛҫЎўіӨЙіЙЈпӘМШЕ©Тө»ъРөЙи
ұёУРПЮ№«ЛҫЎўәюДПМпТ°ПЦҙъЦЗДЬЧ°ұёУРПЮ№«ЛҫҝӘХ№ІъС§СРәПЧчәНІъТө»ҜУҰУГЈ¬ҫЯ
УРәЬЗҝөДКөУГјЫЦөЈ¬ИЎөГБЛПФЦшөДҫӯјГР§ТжЎЈ
Н¬ТвМбГыёГПоДҝОӘәюДПКЎјјКх·ўГчҪұ¶юөИҪұЎЈ
ИэЎўПоДҝјтҪйЈә
ЧФ2004 Дк°дІјЎ¶ЦР»ӘИЛГс№ІәН№ъЕ©Тө»ъРө»ҜҙЩҪш·ЁЎ·ТФАҙЈ¬Е©Тө»ъРөөГөҪ
БЛҝмЛЩөД·ўХ№Ј¬Е©Тө»ъРөјјКхУлЕдМЧЙиК©ҪшТ»ІҪНкЙЖЈ¬ОӘЦЗДЬЕ©»ъөД·ўХ№өм¶ЁБЛ
»щҙЎЎЈ2013 ДкЦРСлТ»әЕОДјюЎ¶№ШУЪјУҝм·ўХ№ПЦҙъЕ©ТөҪшТ»ІҪФцЗҝЕ©ҙе·ўХ№»оБҰ
өДИфёЙТвјыЎ·ЎЈЕ©ТөІҝЎ¶№ШУЪҝӘХ№ЦчТӘЕ©ЧчОпЙъІъИ«іМ»ъРө»ҜНЖҪшРР¶ҜөДТвјыЎ·Ј¬
МбіцІ»ҪцТӘҙуБҰМбЙэЕ©Тө»ъРө»ҜЛ®ЖҪЈ¬»№ТӘјУҝмСР·ўёЯ¶ЛЕ©»ъЧ°ұёј°№ШјьәЛРДБг
ІҝјюЎЈ2015 ДкЈ¬Е©»ъЧ°ұёұ»БРИлЦР№ъЦЖФм2025 ЦШөгБмУтЦ®Т»ЎЈЎ°К®ИэОеЎұЖЪјдЈ¬
ҝЖјјІҝҪ«Ў°ЦЗДЬЕ©»ъЧ°ұёЎұБРИлУЕПИЖф¶ҜөДЦШөгҝЖСРЧЁПоЎЈёЯ¶ЛЕ©»ъЧ°ұёј°ЖдЦЗДЬ
јјКхСР·ўУлУҰУГКЗЎ°ЦР№ъЦЖФм2025ЎұЎўЎ°Т»ҙшТ»В·ЎұХҪВФөДәЛРДДЪИЭЦ®Т»Ј¬КЗМбёЯ№ъ
јКҫәХщБҰөДҙу№ъЦШЖчЎЈ
Хл¶ФВДҙшКҪЕ©»ъЧ°ұё¶ҜБҰЖҪМЁөДұдЛЩҙ«¶ҜЧ°ЦГјҜіЙАләПЎўұдЛЩЎўІоЛЩЧӘПтУл
ЦЖ¶ҜөИ¶аЦЦ№ҰДЬөДМШөгЈ¬ПЦУРВДҙшКҪЕ©»ъЧ°ұё¶ҜБҰЖҪМЁҙ«¶ҜР§ВКөНЎўЧӘПтҫ«ЧјРФ
ІоЈ¬ЧӘПт№эіМЦРВДҙшІаұЯТЧ¶С»эДаНБөјЦВЛ®МпІ»ЖҪХыөИОКМвЈ¬ҝӘХ№БЛВДҙшКҪЕ©»ъ
Ч°ұё¶ҜБҰЖҪМЁПИҪшұдЛЩҙ«¶ҜПөНіСРҫҝЈ¬·ўГчБЛЎ¶Т»ЦЦУГУЪВДҙшЧ°ұёөДұИАэЧӘПтКҪ
ұдЛЩЖчЎ·өИәЛРДЧЁАыјјКхЈ¬КөПЦБЛВДҙшКҪЕ©»ъЧ°ұёёЯР§Зэ¶ҜәНҫ«ЧјЧӘПтЈ¬МбёЯБЛ
ВДҙшЕ©»ъЧ°ұёНЁ№эРФУлРРК»°ІИ«РФЎЈІў»щУЪВДҙшКҪЕ©»ъЧ°ұёЧчТөКұ№Өҝцұд»ҜЙЩЈ¬
І»РиТӘЖө·ұІЩҝШАләПУл»»өөЧ°ЦГЈ¬ЦЗДЬ»ҜМбЙэЗұБҰҙуөДМШөгЈ¬ФЪВДҙшЕ©»ъЧ°ұёұИ
АэЧӘПтКҪұдЛЩЖч»ъРөҪб№№ЦРөДАләПЖчЎўұдЛЩ»»өөЎўІоЛЩұИАэЧӘПтЎўЦЖ¶ҜөИЧ°ЦГөЧ
ІгЙијЖКұЈ¬ҝјВЗНвҪУөзҝШЧ°ЦГөДұгҪЭРФУлҝЙДЬРФЈ¬ҝӘХ№БЛ»щУЪВДҙшКҪ¶ҜБҰЖҪМЁөД
ТЧУЪөзҝШ»ҜУлЦЗДЬ»ҜөЧІгјјКхҝӘ·ўЈ¬·ўГчБЛЎ¶Т»ЦЦККәПФ¶іМҝШЦЖ»»өөөДВДҙшЧ°ұё
УГұдЛЩЖчЎ·ЎўЎ¶Т»ЦЦ¶аНЁөАВДҙшЧ°ұёТЈҝШЙиұёЎ·өИ¶аёцәЛРДЧЁАыјјКхЈ¬ҪвҫцБЛВД
ҙш¶ҜБҰЖҪМЁ»ъРөҪб№№УлЦЗДЬ»ҜҪУҝЪИЪәПөДјјКхДСМвЈ¬КөПЦФ¶ҫаАлТЈҝШјЭК»ј°ОЮИЛ
јЭК»ЎЈҝЛ·юБЛПЦУРВДҙшЕ©»ъЧ°ұёНЁ№эЦұҪУ¶С»эөзҝШЧ°ЦГКөПЦЧФ¶Ҝ»ҜөјЦВөДҝШЦЖҫ«
¶ИөНЎўҪб№№ёҙФУЎўіЙұҫёЯөИОКМвЈ¬¶ФМбёЯЕ©»ъЧ°ұёөДЦЗДЬ»ҜЛ®ЖҪҫЯУРЦШТӘөДТвТеЎЈ
ДҝЗ°Ј¬ұҫјјКхХэФЪәюДПЕ©·т»ъөзУРПЮ№«ЛҫЎўіӨЙіЙЈпӘМШЕ©Тө»ъРөЙиұёУРПЮ№«
ЛҫЎўәюДПМпТ°ПЦҙъЦЗДЬЧ°ұёУРПЮ№«ЛҫҝӘХ№ІъС§СРәПЧчәНІъТө»ҜУҰУГЈ¬ҪьИэДк№ІНЖ
№гВДҙшКҪНПАӯ»ъЎўВДҙшКҪБӘәПКХёо»ъЎўВДҙшКҪРэёы»ъЎўВДҙшКҪВЭРэЕаНБ»ъөИХы»ъ
і¬№э6000 МЁЈ¬РВФцПъКЫКХИл5.7 ТЪФӘЈ¬РВФцАыИу0.62 ТЪФӘЈ¬ИЎөГБЛПФЦшөДҫӯјГ
Р§ТжЎЈ
ЛДЎўҝН№ЫЖАјЫЈә
1ЎўәюДПГыЕЖІъЖ·ЦӨКйЈ¬ЖАјЫјјКх·ўГчөДПИҪшРФЎЈёҪјюF5-4ЎЈ
1Ј©К№УГёГјјКх·ўГчөДNF-502 ЗбРНВДҙшНПАӯ»ъЎў°лО№ИлКХёо»ъұ»ИП¶ЁОӘәю
ДПКЎГыЕЖІъЖ·іЖәЕЎЈ
2ЎўЕ©»ъНЖ№гјш¶ЁУлјмСйұЁёжЈ¬ЖАјЫІЙУГёГјјКх·ўГчөДІъЖ··ыәПРРТөұкЧјТӘ
ЗуЎЈёҪјюF5-5~15ЎЈ
1Ј©К№УГёГјјКх·ўГчөДNF-702 ЗбРНВДҙшНПАӯ»ъУЪ2015 ДкНЁ№эЕ©ТөІҝЕ©Тө»ъ
РөКФСйјш¶ЁЧЬХҫјмСйЈ¬јмСйұЁёжұаәЕNoЈәB2005TJ02112JЈ¬НЖ№гјш¶ЁұЁёжЈә
B2005TJ02112ЎЈ
2Ј©К№УГёГјјКх·ўГчөДNF-Y602ЎўNF-Y702ЎўNF-802ЎўNF-Y802ЎўNF-902 Пө
БРЗбРНВДҙшНПАӯ»ъУЪ2017 ДкНЁ№эәюДПКЎЕ©Тө»ъРөјш¶ЁХҫјмСйЈ¬2018 Дк»сөГНЖ№г
јш¶ЁЦӨКйЈ¬ЖдұаәЕ·ЦұрОӘПж20180404025ЎўПж20180404024ЎўПж20180404028Ўў
Пж20180404026ЎўПж20180404029ЎЈ
3Ј©К№УГёГјјКх·ўГчөД4LBZ-120YA РН°лО№ИлБӘәПКХёо»ъ2015 ДкНЁ№эЕ©ТөІҝ
Е©Тө»ъРөКФСйјш¶ЁЧЬХҫјмСй»сөГНЖ№гјш¶ЁЦӨКйЈ¬ұаәЕЈәІҝ20151036ЎЈ
4Ј©К№УГёГјјКх·ўГчөД1GZL-230 ЧФЧЯВДҙшКҪРэёы»ъУЪ2017 Дк»сөГЕ©Тө»ъРө
НЖ№гјш¶ЁЦӨКйЈ¬ЦӨКйұаәЕОӘПж2014122165ЎЈ
5Ј©К№УГёГјјКх·ўГчөД3PT-400 ЕаНБ»ъУЪ2015 ДкНЁ№эәюДПКЎЕ©»ъјш¶ЁХҫјмСйЈ¬
јмСйұЁёжұаәЕNoЈәJD2015102ЎЈ
6Ј©К№УГёГјјКх·ўГчөД1S-100 РНЙоЛЙ»ъЈЁ»щУЪВДҙшКҪЧчТөөЧЕМЈ©УЪ2017 Дк
НЁ№эәюДПКЎЕ©»ъјш¶ЁХҫјмСйЈ¬2018 Дк»сөГјмСйұЁёжЈ¬ұаәЕNoЈәBS2018060501ЎЈ
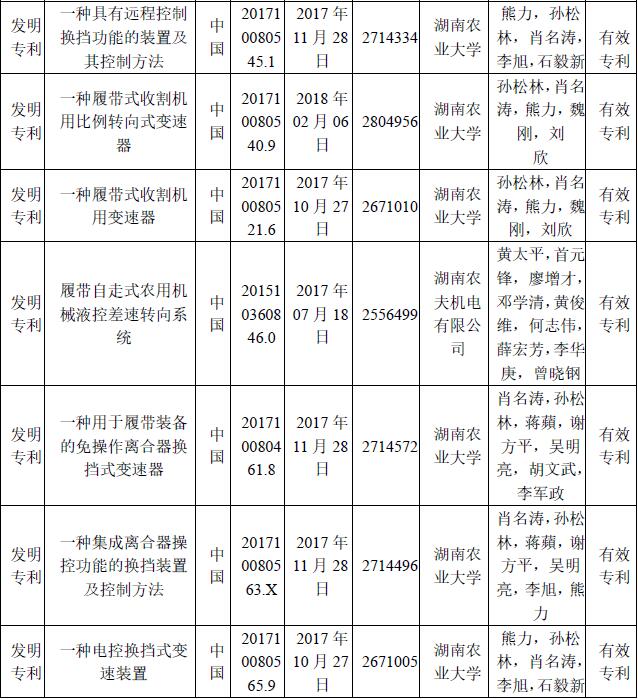
3Ўў·ўГчЧЁАы»сөГУЕПИЙуІйКЪИЁЈ¬ЖАјЫјјКх·ўГчПИҪшРФЈәёҪјюF5-16~22Ўў
F5-23~25ЎЈ
УлұҫПоДҝПа№ШөД10 ёцКЪИЁ·ўГчЧЁАыЈ¬ФЪМбҪ»ЙуІйЧКБПКұЙкЗлБЛУЕПИЙуІйЎЈ
ФЪУЕПИЙуІйөД№эіМЦРЈ¬№ъјТЦӘК¶ІъИЁҫЦ»бёьјУСПёсөД¶ФұИГҝТ»ёц·ўГчөгФЪ№ъДЪНв
ұҫБмУтјјКхЦРөДРВУұРФЎўҙҙФмРФәНКөУГРФЈ¬Ц»УРФЪИэРФ¶јВъЧгөДМхјюПВЈ¬ІЕДЬёш
УиУЕПИЙуІйМШИЁЈ¬ЖдЦР9 ёц·ўГчЧЁАы»сөГБЛУЕПИЙуІйЧКёсЈ¬ФЪ12 ФВДЪ»сөГКЪИЁЈ¬
ТСҫӯід·ЦҝП¶ЁБЛұҫ·ўГчіЙ№ыөДПИҪшРФЎЈ
1Ј© Т»ЦЦУГУЪВДҙшЧ°ұёөДұИАэЧӘПтКҪұдЛЩЖч
2Ј© Т»ЦЦККәПФ¶іМҝШЦЖ»»өөөДВДҙшЧ°ұёУГұдЛЩЖч
3Ј© Т»ЦЦ¶аНЁөАВДҙшЧ°ұёТЈҝШЙиұё
4Ј© Т»ЦЦҫЯУРФ¶іМҝШЦЖ»»өө№ҰДЬөДЧ°ЦГј°ЖдҝШЦЖ·Ҫ·Ё
5Ј© Т»ЦЦВДҙшКҪКХёо»ъУГұИАэЧӘПтКҪұдЛЩЖч
6Ј© Т»ЦЦВДҙшКҪКХёо»ъУГұдЛЩЖч
7Ј© Т»ЦЦУГУЪВДҙшЧ°ұёөДГвІЩЧчАләПЖч»»өөКҪұдЛЩЖч
8Ј© Т»ЦЦјҜіЙАләПЖчІЩҝШ№ҰДЬөД»»өөЧ°ЦГј°ҝШЦЖ·Ҫ·Ё
9Ј© Т»ЦЦөзҝШ»»өөКҪұдЛЩЧ°ЦГ
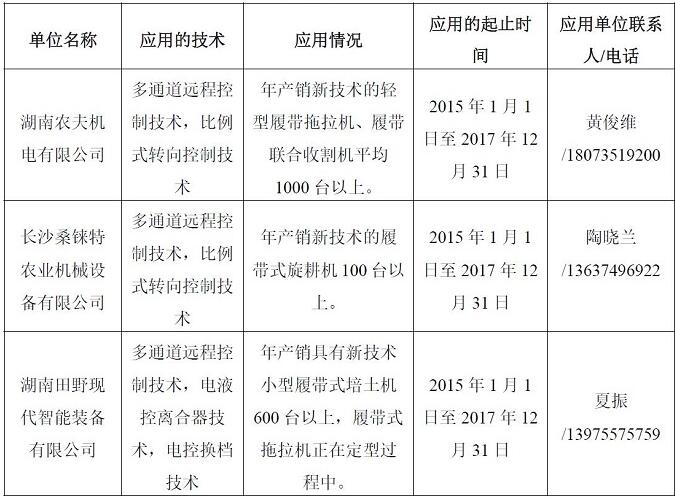
ОеЎўНЖ№гУҰУГЗйҝцЈә
ұҫПоДҝСРҫҝөДәЛРДјјКхФЪәюДПЕ©·т»ъөзУРПЮ№«ЛҫЎўіӨЙіЙЈпӘМШЕ©Тө»ъРөЙи
ұёУРПЮ№«ЛҫЎўәюДПМпТ°ПЦҙъЦЗДЬЧ°ұёУРПЮ№«ЛҫҝӘХ№НЖ№гУлІъС§СРСР·ўЈ¬ҪьИэДкНЖ
№гВДҙшКҪНПАӯ»ъЎўВДҙшКҪБӘәПКХёо»ъЎўВДҙшКҪРэёы»ъЎўВДҙшКҪВЭРэЕаНБ»ъөИХы»ъ
і¬№э6000 МЁЈ¬РВФцПъКЫКХИл5.7 ТЪФӘЈ¬РВФцАыИу0.62 ТЪФӘЎЈУЙУЪГҝМЁНПАӯ»ъЦ»
°ІЧ°1 МЁұдЛЩЖчј°ЖдЦЗДЬ»ҜЧ°ЦГЈ¬ЖдЧЬјЫЦөХјХы»ъөД1/4 ТФЙПЈ¬ТтҙЛЈ¬ИэДкАҙҪц
№ШјьјјКх»сөГРВФцПъКЫКХИлі¬№э1.4 ТЪФӘЈ¬АыИу0.16 ТЪФӘЈ¬ҫӯјГР§ТжПФЦшЎЈ
ЦчТӘУҰУГөҘО»Зйҝцұн
БщЎўЦчТӘЦӘК¶ІъИЁәНұкЧј№ж·¶өИДҝВјЈә

ЖЯЎўЦчТӘНкіЙИЛЗйҝцЈә
өЪТ»НкіЙИЛЈәРХГыЈәРӨГыМОЈ¬ЕЕГыЈә1Ј¬РРХюЦ°ОсЈәОЮЈ¬јјКхЦ°іЖЈәёұҪМКЪЎЈ
№ӨЧчөҘО»ЈәәюДПЕ©ТөҙуС§Ј¬НкіЙөҘО»ЈәәюДПЕ©ТөҙуС§ЎЈ
¶ФұҫПоДҝјјКхҙҙФмРФ№ұПЧЈә
1Ј©ёәФрПоДҝҝӘ·ўУл·Ҫ°ёЙијЖЎЈ
2Ј©ёәФрАләПЖчЎўұдЛЩЖчЎўФ¶іМҝШЦЖЧ°ЦГөИ№ШјьјјКхҝӘ·ўЎЈ
3Ј©ёәФрКФСйСРҫҝЎЈ
өЪ¶юНкіЙИЛЈәРХГыЈәЛпЛЙБЦЈ¬ЕЕГыЈә2Ј¬РРХюЦ°ОсЈәФәіӨЈ¬јјКхЦ°іЖЈәҪМКЪЎЈ
№ӨЧчөҘО»ЈәәюДПЕ©ТөҙуС§Ј¬НкіЙөҘО»ЈәәюДПЕ©ТөҙуС§ЎЈ
¶ФұҫПоДҝјјКхҙҙФмРФ№ұПЧЈә
1Ј©ёәФрПоДҝҝӘ·ўУл·Ҫ°ёЙијЖЦёөјЎЈ
2Ј©ёәФрКФСйСРҫҝЦёөјЎЈ
өЪИэНкіЙИЛЈәРХГыЈәРЬБҰЈ¬ЕЕГыЈә3Ј¬РРХюЦ°ОсЈәОЮЈ¬јјКхЦ°іЖЈәҪІКҰЎЈ№Ө
ЧчөҘО»ЈәәюДПЕ©ТөҙуС§Ј¬НкіЙөҘО»ЈәәюДПЕ©ТөҙуС§ЎЈ
¶ФұҫПоДҝјјКхҙҙФмРФ№ұПЧЈә
1Ј©ёәФрөзҝШПөНіөДҝӘ·ўУлЙијЖЎЈ
2Ј©ІОУлКФСйСРҫҝЎЈ
өЪЛДНкіЙИЛЈәРХГыЈәОәёХЈ¬ЕЕГыЈә4Ј¬РРХюЦ°ОсЈәОЮЈ¬јјКхЦ°іЖЈәҪІКҰЎЈ№Ө
ЧчөҘО»ЈәәюДПЕ©ТөҙуС§Ј¬НкіЙөҘО»ЈәәюДПЕ©ТөҙуС§ЎЈ
¶ФұҫПоДҝјјКхҙҙФмРФ№ұПЧЈә
1Ј©ёәФрХы»ъөДКЬБҰ·ЦОцУлБҰѧУәЛЎЈ
2Ј©ІОУл»ъРөЧ°ЦГЙијЖЎЈ
3Ј©ІОУлКФСйСРҫҝЎЈ
өЪОеНкіЙИЛЈәРХГыЈә»ЖҝЎО¬Ј¬ЕЕГыЈә5Ј¬РРХюЦ°ОсЈәОЮЈ¬јјКхЦ°іЖЈә№ӨіМКҰЈ¬
№ӨЧчөҘО»ЈәәюДПЕ©·т»ъөзУРПЮ№«ЛҫЈ¬НкіЙөҘО»ЈәәюДПЕ©·т»ъөзУРПЮ№«ЛҫЎЈ
¶ФұҫПоДҝјјКхҙҙФмРФ№ұПЧЈә
1Ј©ёәФрВДҙшКҪНПАӯ»ъУлВДҙшКҪКХёо»ъөДјУ№ӨЎўЦЖФмЎЈ
2Ј©ІОУлВДҙшЧФЧЯКҪЕ©УГ»ъРөТәҝШІоЛЩЧӘПтПөНі№ШјьјјКхҝӘ·ўЎЈ
3Ј©ІОУлКФСйСРҫҝЎЈ
өЪБщНкіЙИЛЈәРХГыЈәЦЬЦҫЈ¬ЕЕГыЈә6Ј¬РРХюЦ°ОсЈәЧЬҫӯАнЈ¬јјКхЦ°іЖЈәҫӯјГ
КҰЈ¬№ӨЧчөҘО»ЈәіӨЙіЙЈпӘМШЕ©Тө»ъРөЙиұёУРПЮ№«ЛҫЈ¬НкіЙөҘО»ЈәіӨЙіЙЈпӘМШЕ©Тө
»ъРөЙиұёУРПЮ№«ЛҫЎЈ
¶ФұҫПоДҝјјКхҙҙФмРФ№ұПЧЈә
1Ј©ёәФрВДҙшКҪРэёы»ъөДјУ№ӨЎўЦЖФмЎЈ
2Ј©ІОУлТ»ЦЦ¶аНЁөАВДҙшЧ°ұёТЈҝШЙиұё№ШјьјјКхҝӘ·ўЎЈ
3Ј©ІОУлКФСйСРҫҝЎЈ
°ЛЎўЦчТӘНкіЙөҘО»ј°ҙҙРВНЖ№г№ұПЧЈә
өЪТ»НкіЙөҘО»ЈәәюДПЕ©ТөҙуС§ЎЈ
1Ј©·ўГчБЛВДҙшЕ©»ъ¶ҜБҰЖҪМЁұИАэКҪЧӘПтұдЛЩ№ШјьјјКхЈ¬ҙҙРВЙијЖБЛөзТәҝШ
РРРЗіЭВЦІоЛЩЧӘПтЧ°ЦГЈ¬ҪвҫцБЛВДҙшКҪЕ©»ъЧ°ұёЧӘПтҫ«ЧјРФІоЈ¬ЧӘПт№эіМЦРВДҙш
ІаұЯТЧ¶С»эДаНБөјЦВЛ®МпІ»ЖҪХыөИОКМвЎЈ
2Ј©·ўГчБЛФ¶іМҝШЦЖ»»өІЎўөзТәҝШЧӘПтЎўөзҝШАләПЖчөИ№ШјьјјКхЈ¬ҙҙРВЙијЖ
БЛТЧУЪЦЗДЬ»ҜҝШЦЖөДВДҙшКҪЕ©Тө»ъРө¶ҜБҰЖҪМЁ»ъРөЧ°ЦГөЧІгҪб№№Ј¬МбЙэБЛВДҙшКҪ
Е©Тө»ъРөөДЧчТөЦКБҝЎЈІўНЁ№эУл¶аНЁөАТЈҝШҝШЦЖЧ°ЦГҝӘХ№ІъС§СРәПЧчЈ¬КөПЦБЛВД
ҙшЕ©»ъЧ°ұёФ¶ҫаАлТЈҝШҝШЦЖЎЈ
3Ј©ОӘПоДҝөДЛіАыҝӘХ№МṩБЛКФСйКТЎўКФСйЙиұёөИУІјюЦ§іЕМхјюЎЈ
4Ј©ёәФрЧйЦҜНЕ¶УҝӘХ№№ШјьјјКхСРҫҝЈ¬ЦчТӘБгІҝјюЙијЖЈ¬јјКх·ВХж·ЦОцЈ¬ёә
ФрЧйЦҜНЕ¶УҝӘХ№ІъС§СРәПЧчСРҫҝЎЈ
өЪ¶юНкіЙөҘО»ЈәәюДПЕ©·т»ъөзУРПЮ№«ЛҫЎЈ
1Ј©ВДҙшКҪНПАӯ»ъУлВДҙшКҪБӘәПКХёо»ъөДСР·ўУлНЖ№гЎЈ
2Ј©ұИАэЧӘПтКҪұдЛЩЖч№ШјьјјКхСР·ўЎЈ
3Ј©ТЈҝШВДҙшНПАӯ»ъСР·ўУлНЖ№гЎЈ
4Ј©№ШјьБгІҝјюјУ№ӨЎўЦЖФмУлКФСйСйЦӨЎЈ
өЪИэНкіЙөҘО»ЈәіӨЙіЙЈпӘМШЕ©Тө»ъРөЙиұёУРПЮ№«ЛҫЎЈ
1Ј©ВДҙшКҪРэёы»ъөДСР·ўУлІъТө»ҜНЖ№гЎЈ
2Ј©¶аНЁөАТЈҝШЧ°ЦГөДСР·ўУлУҰУГЎЈ
ҫЕЎўЦчТӘНкіЙИЛәПЧч№ШПөЛөГчЈә
ПоДҝНкіЙИЛРӨГыМОЎўЛпЛЙБЦЎўРЬБҰЎўОәёХОӘәюДПЕ©ТөҙуС§№ӨС§ФәҪМЦ°№ӨЎў
»ЖҝЎО¬ОӘәюДПЕ©·т»ъөзУРПЮ№«ЛҫЦ°№ӨЎўЦЬЦҫОӘіӨЙіЙЈпӘМШЕ©Тө»ъРөЙиұёУРПЮ№«Лҫ
Ц°№ӨЎЈұҫјјКх·ўГчТАНР2015 ДкәюДПКЎҝЖјјМьЦШөгСР·ўјЖ»®Ў¶ДП·ҪЗрБкЙҪЗшөҫУН
»ъРө»ҜЙъІъ№ШјьјјКхСРҫҝУлІъТө»ҜЎ·(2015NK2006)ПоДҝЈ¬ёГПоДҝУЙәюДПЕ©ТөҙуС§
ЦчіЦЈ¬әюДПЕ©·т»ъөзУРПЮ№«ЛҫІОУлЎЈіӨЙіЙЈпӘМШЕ©Тө»ъРөЙиұёУРПЮ№«ЛҫОӘәюДПЕ©
ТөҙуС§ІъС§СРәПЧчөҘО»Ј¬әюДПЕ©ТөҙуС§СР·ўөД№ШјьјјКхФЪіӨЙіЙЈпӘМШЕ©Тө»ъРөЙи
ұёУРПЮ№«ЛҫЧӘ»ҜЎЈ
ЖдЦРЈ¬РӨГыМОУлЛпЛЙБЦ№ІН¬әПЧч·ўГчөДЧЁАыУРЈәТ»ЦЦУГУЪВДҙшЧ°ұёөДГвІЩ
ЧчАләПЖч»»өІКҪұдЛЩЖчЎўТ»ЦЦУГУЪВДҙшЧ°ұёөДұИАэЧӘПтКҪұдЛЩЖчЎЈ
РӨГыМОЎўЛпЛЙБЦЎўРЬБҰ№ІН¬әПЧч·ўГчөДЧЁАыУРЈәТ»ЦЦјҜіЙАләПЖчІЩҝШ№ҰДЬ
өД»»өІЧ°ЦГј°ҝШЦЖ·Ҫ·ЁЎўТ»ЦЦөзҝШ»»өІКҪұдЛЩЧ°ЦГЎўТ»ЦЦҫЯУРФ¶іМҝШЦЖ»»өІ№ҰДЬ
өДЧ°ЦГј°ЖдҝШЦЖ·Ҫ·ЁЎЈ
РӨГыМОЎўЛпЛЙБЦЎўРЬБҰЎўОәёХ№ІН¬әПЧч·ўГчөДЧЁАыУРЈәТ»ЦЦВДҙшКҪКХёо»ъ
УГұИАэЧӘПтКҪұдЛЩЖчЎўТ»ЦЦВДҙшКҪКХёо»ъУГұдЛЩЖчЎўТ»ЦЦККәПФ¶іМҝШЦЖ»»өІөДВД
ҙшЧ°ұёУГұдЛЩЖчөИ·ўГчЎЈ
РӨГыМОЎўЛпЛЙБЦЎў»ЖҝЎО¬№ІН¬әПЧчНкіЙВДҙшКҪ»ъРөЧ°ұёУРЈәNF-602Ўў702Ўў
802Ўў902 ВДҙшКҪНПАӯ»ъЈ¬4LBZ-120YA РН°лО№ИлБӘәПКХёо»ъЎЈ
РӨГыМОЎўЛпЛЙБЦЎўЦЬЦҫ№ІН¬әПЧчНкіЙВДҙшКҪ»ъРөЧ°ұёУРЈә1GZL-230 ЧФЧЯВД
ҙшКҪРэёы»ъЎЈ
|
